Gli encoder capacitivi o induttivi possono sembrare, a prima vista, molto simili e gli aspetti che li differenziano possano apparire confusi. Entrambi utilizzano una tecnica di […]
Gli encoder capacitivi o induttivi possono sembrare, a prima vista, molto simili e gli aspetti che li differenziano possano apparire confusi. Entrambi utilizzano una tecnica di non contatto per la misurazione della posizione, e entrambi possono essere costruiti impiegando circuiti stampati. Tuttavia i principi fisici su cui si basano sono piuttosto diversi.
Questo articolo spiega queste diversità confrontandone i lati positivi e negativi che entrambe le soluzioni presentano.
Sensori Capacitivi – Principio di funzionamento
La scoperta della possibilità di immagazzinare grosse quantità di energia elettrica, è da attribuire allo scienziato Ewald George von Kleist, inventore del primo condensatore. Questo componente è formato da due piastre (o facce) conduttive separate da un materiale dielettrico, tipicamente aria, plastica o ceramica. Un semplice modello matematico del condensatore è mostrato in Figura 1.
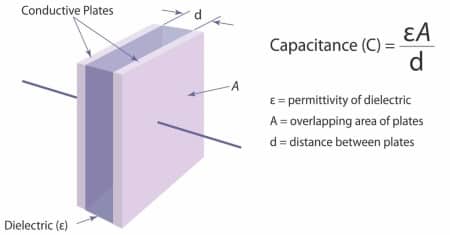
La permittività elettrica Ԑ, ovvero la quantità di energia elettrica trattenuta da un materiale non conduttore sottoposto ad un campo elettrico, è costituita da due parti Ԑr e Ԑ0 dove Ԑr è la permittività statica relativa (anche chiamata costante dielettrica) del materiale tra le due piastre, Ԑ0 la permittività statica nel vuoto. (Ԑ0 = 8.854E-22 F/m).
Il principio capacitivo è utilizzato in dispositivi quali telefoni, tablet, cellulari che impiegano la tecnologia touch screen, ovvero rilevano la presenza o l’assenza di un dito grazie alla variazione della costante dielettrica Ԑr che va a cambiare la capacità.
Una seconda applicazione è rappresentata dal sensore capacitivo di spostamento ovvero una riga lineare capacitiva o un encoder capacitivo rotativo; questi sensori lavorano sulla variazione di capacità tra le facce del condensatore. Come si può notare dalla Figura 1 la capacità varia in proporzione alla distanza tra le facce (d) e all’area di sovrapposizione (A). Lo spostamento può essere misurato assialmente variando d, oppure in direzione planare variando l’area di sovrapposizione A. Le facce del condensatore possono essere costruite impiegando circuiti stampati, il che permette un notevole vantaggio in termini economici. Per memorizzare qualsiasi quantità significativa di carica la dimensione d deve essere piccola rispetto all’area delle piastre. Solitamente d è 1 mm. I sensori capacitivi lineari o rotativi, sono costruiti in modo tale che lo spostamento provochi una variazione in A o in d. In altre parole una faccia è sull’elemento mobile del sensore mentre l’altra faccia è sull’elemento fisso. Mentre i 2 elementi si spostano tra loro si ha una variazione della superficie capacità C del condensatore.
Purtroppo la capacità è anche influenzata da fattori diversi dallo spostamento. Se il materiale dielettrico è circondato da aria, la sua permittività varia sia con la temperatura sia con la presenza di umidità, infatti l’acqua ha una diversa costante dielettrica rispetto all’aria; cambiando la permittività cambia di conseguenza la capacità. A meno che il materiale dielettrico non venga sigillato, i sensori capacitivi non sono adatti a lavorare in ambienti con sbalzi termici elevati o con probabilità di condensazione e/o variazioni di umidità.
La necessità intrinseca di avere una distanza tra le facce del sensore molto contenuta rispetto alle dimensioni delle facce stesse, comporta una grande precisione meccanica per l’installazione. Questo fattore implica un aumento notevole del costo di installazione; Oltretutto si dovrà tenere contro anche dell’espansione termica e dell’influenza che possono avere eventuali derivanti dalla struttura esterna al sensore che avranno ripercussioni sulla distanza tra e facce del condensatore e causando una distorsione della misura.
Inoltre l’effetto capacitivo si basa sulla conservazione della carica elettrica nel condensatore. Se il sistema attorno al sensore genera cariche elettrostaiche, queste possono influenzare negativamente la misurazione. In casi estremi il sensore non funziono affatto o, peggio ancora, il disturbo elettrostatico genererà una misurazione credibile ma errata. La messa a terra del sistema meccanico su cui viene installato il sensore, può essere una soluzione ed è indispensabile per i sensori angolari capacitivi in cui l’albero rotante genera cariche statiche derivanti dal rotolamento dei cuscinetti, dagli ingranaggi o dalle pulegge.
Sensori induttivi – Principio di funzionamento
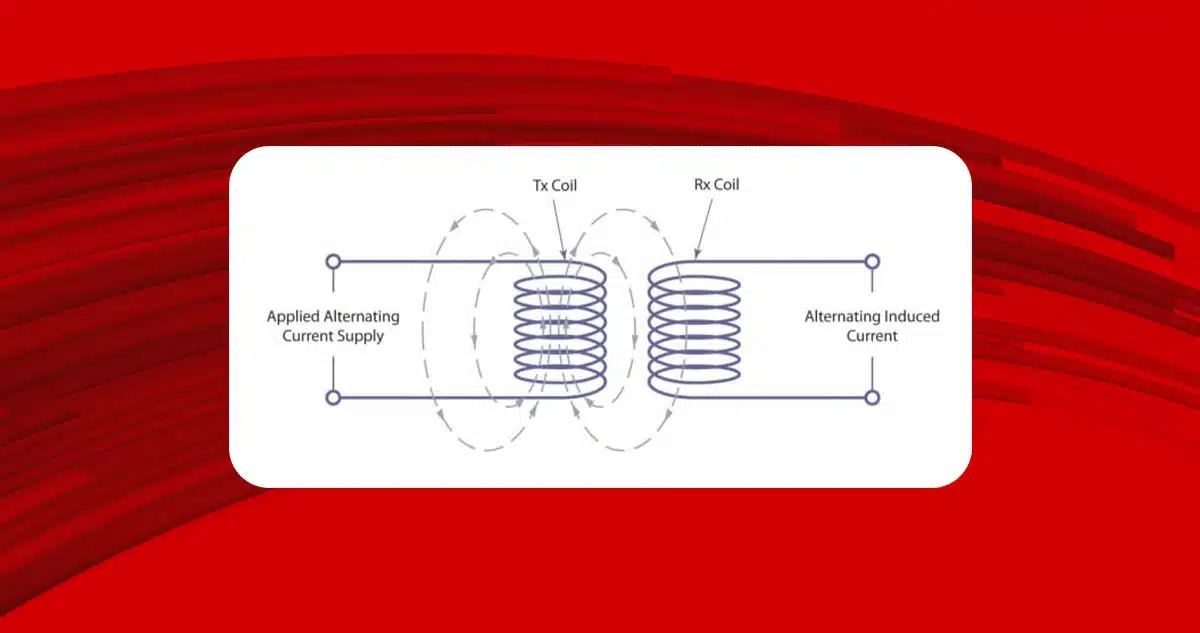
Nel 1831, Michael Faraday, scoprì che una corrente alternata che percorre un conduttore può indurre una corrente in senso opposto in un secondo conduttore affiancato al primo. Questo principio di induzione viene ampliamente usato come base di misura della posizione e della velocità nei resolver, nei synchro e negli LVDT. La teoria di base può essere spiegata considerando 2 avvolgimenti, uno definito trasmettitore (Tx) a quale si applica una corrente alternata, ed il secondo che funge da ricevitore (Rx) nel quale viene indotta una corrente:
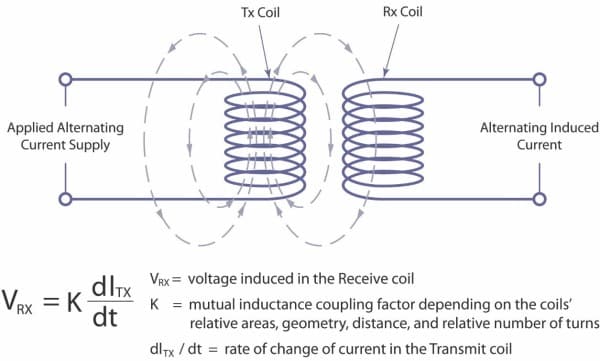
La tensione nell’avvolgimento di ricezione è funzione dell’area delle bobine, della geometria della distanza tra le due. Tuttavia, come con i sensori capacitivi, anche per i sensori induttivi diversi fattori possono influenzare il comportamento delle bobine. La temperatura è uno di questi, ma può essere eliminato semplicemente impiegando più bobine di ricezione e calcolando la posizione dal differenziale tra i segnali ricevuti (come in un trasformatore differenziale). Di conseguenza se la temperatura cambia, l’effetto viene annullato poiché il differenziale tra i segnali ricevuti è inalterato per una data posizione.
A differenza dei sistemi con tecnologia capacitiva, quelli con tecnologia induttiva sono meno influenzati dagli agenti esterni come acqua e particelle. Poiché le bobine possono essere distanziate in modo rilevante, la precisione meccanica per l’installazione è meno importante e i due elementi, quello fisso e quello mobile hanno tolleranze di montaggio abbastanza elevate. Ciò aiuta a ridurre i costi di installazione e permette l’incapsulamento dei componenti permettendo ai sensori di resistere a sollecitazioni esterne come vibrazioni, essere immune a sostanze gassose o presenza di polvere.
I sensori induttivi forniscono una soluzione ottimale per quelle applicazioni che prevedono un alloggiamento in ambienti particolari tipici delle applicazioni per la difesa, aerospaziale e nell’industria petrolifere.
Uno dei maggiori inconvenienti dei sensori induttivi è che per la costruzione impiegano delle bobine di ferrite che devono essere costruite con particolare accuratezza per ottenere una misurazione precisa della posizione. Un numero significativo di bobine deve essere impiegato per ottenere un segnale elettrico stabile e questo li rende ingombranti, pesanti e costosi.
Si pensa che i sensori induttivi siano particolarmente sensibili a disturbi elettromagnetici ma l’impiego, con successo, dei resolver come elemento adatto per pilotare la commutazione e controllare la velocità dei motori smentisce completamente questa teoria. Sia i resolver che gli LVDT sono la soluzione per applicazioni aerospaziali o civili già da molti anni.
Un differente approccio ai sensori induttivi
Un approccio diverso ai sensori induttivi è quello di impiegare una tecnologia di stampa laminare per la realizzazione delle bobine anziché impiegare le bobine in ferrite, ed è la soluzione impiegata da Zettlex. Questo comporta che gli avvolgimenti possono essere prodotti in rame inciso o stampato su differenti varietà di pellicole in poliestere o carta oppure laminati su ceramica. In questo modo si realizzano avvolgimenti molto precisi raggiungendo una prestazione di misura molto maggiore a costi contenuti, peso degli avvolgimenti contenuto pur mantenendo inalterata la robustezza.
Gli IncOder Zettlex sono dispositivi senza contatto tra i due elementi principali, ciascuno a forma di anello. L’ampio foro rende più facile il montaggio su alberi passanti, su collettori rotanti, fibre ottiche, tubi e cavi. IncOrder non richiedono un montaggio meccanico con alte tolleranze, il rotore e lo statore possono facilmente essere avvitati alle parti meccaniche della macchina. La misurazione non viene influenzata da elementi esterni e sono ideali per ambienti difficili in cui i dispositivi capacitivi potrebbero risultare inaffidabili.
In conclusione
I benefici dei tre differenti sensori sono indicati nella tabella sottostante. Si può notare che dei tre sistemi quello con approccio induttivo non tradizionale, impiegato da Zettlex, è quello che elenca il maggior numero di vantaggi.
| Capacitive | Inductive (Traditional Coils) | Inductive (Printed Coils) | |
| High Resolution | X | X | X |
| High Repeatability | X | X | X |
| High Accuracy | X | X | X |
| Resilience to Dirt, Water or Condensation | X | X | |
| Resilience to electrostatic effects | X | X | |
| Robust EMC OperationLow Thermal Drift | X | X | X |
| Low Thermal Drift | X | ||
| Easy to Install | ? | X | |
| Compact | X | X | |
| Lightweight | X | X | |
| Economical | ? | X |

