


Mechatronic projects
With over 40 years of experience in industrial automation, Servotecnica is one of the world’s leading suppliers of customized mechatronic solutions and electromechanical components for a variety of industries. Our strength lies in combining innovative technologies with the experience and expertise of our engineers.
Go to projects

More than 40 years of experience
Our motion specialists are here to help you choose the best solution for your application. Discover Servotecnica’s added value on design, logistics, quality and more.
Find out moreBlog News
View all News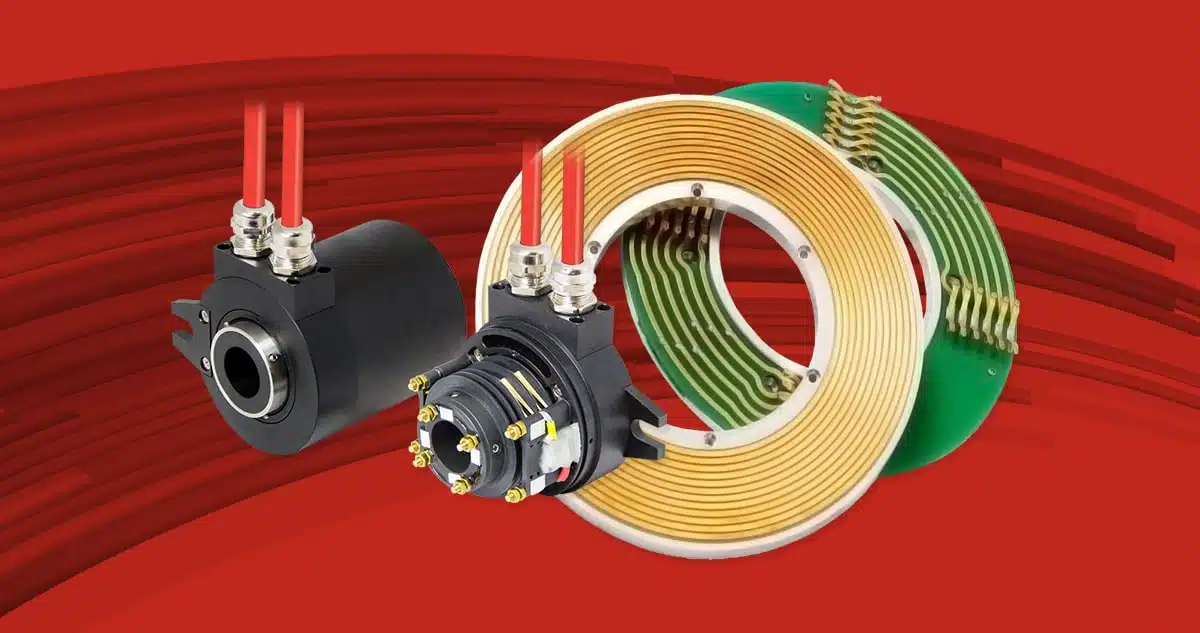
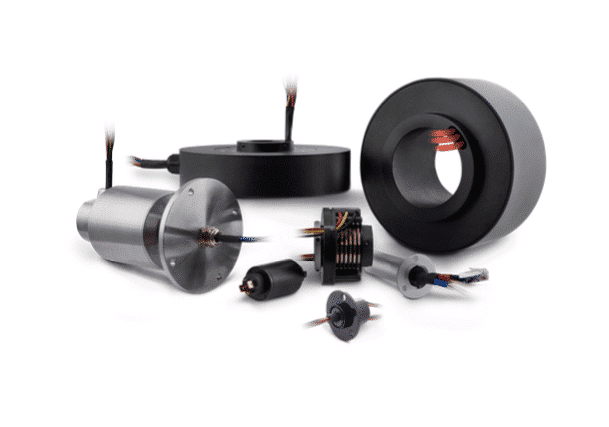
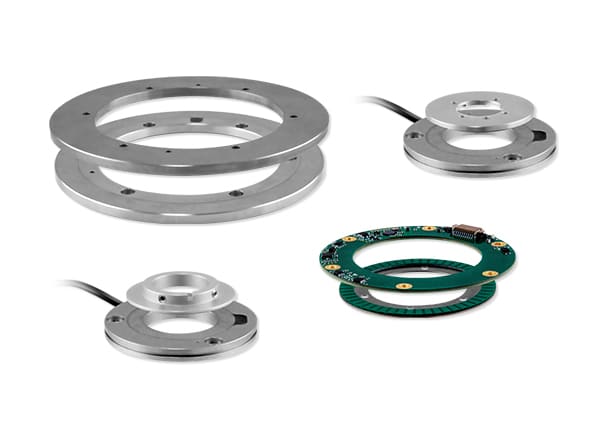
Even engineers who may not use slip rings in their everyday roles will be aware of how these electromechanical devices facilitate the...
Find out more
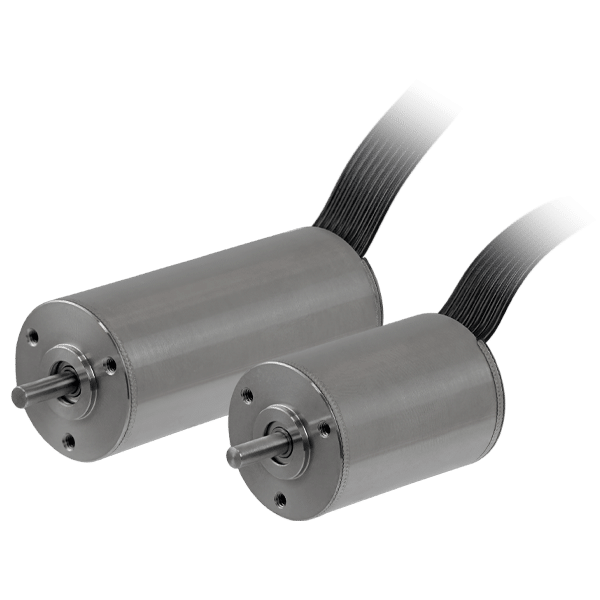
Are you sure you know about coreless motors and their advantages? If the answer is “not much” or “just a littleR...
Find out more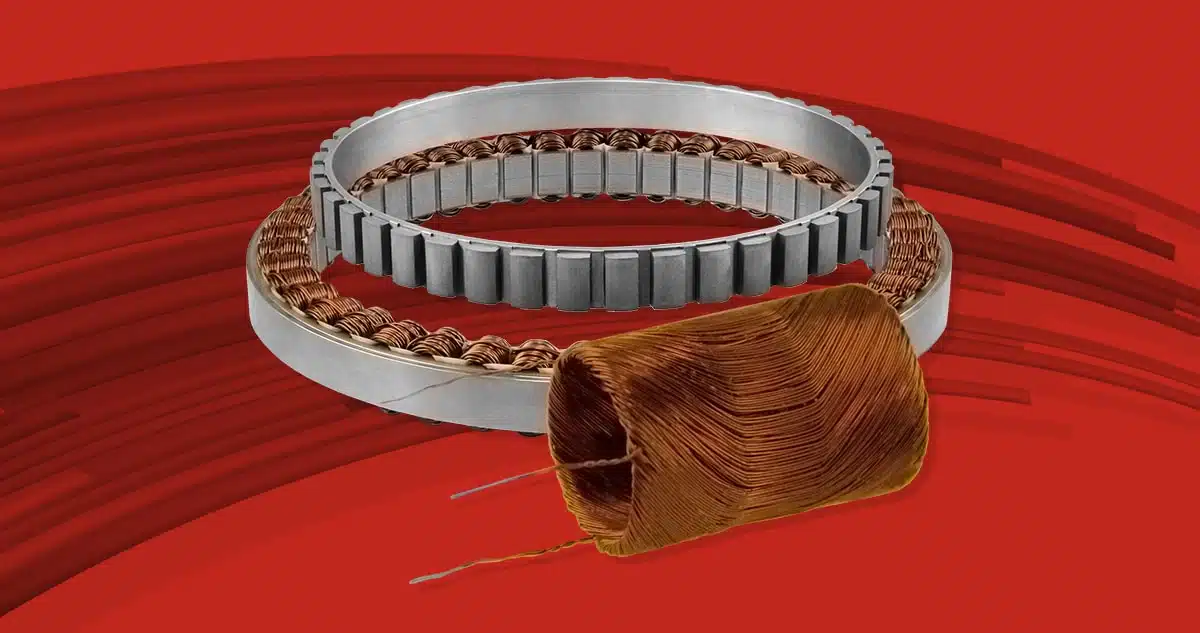
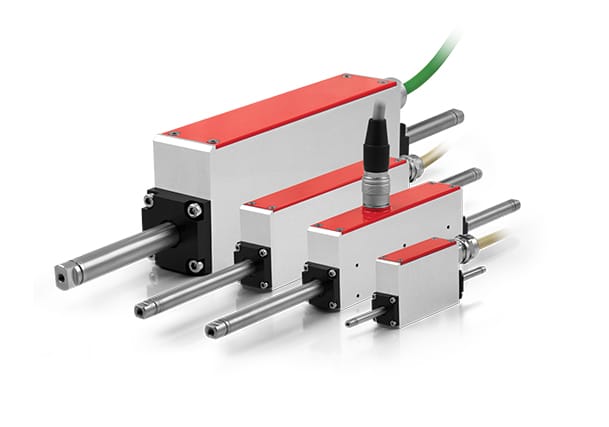
THE CHALLENGE Permanent magnet brushless motors can generate rotary and linear motion. They are known for their high torque density a...
Find out more