The introduction of new materials as well as new control techniques has resulted in the expansion of the flexographic printing technique, broadening the areas of use […]
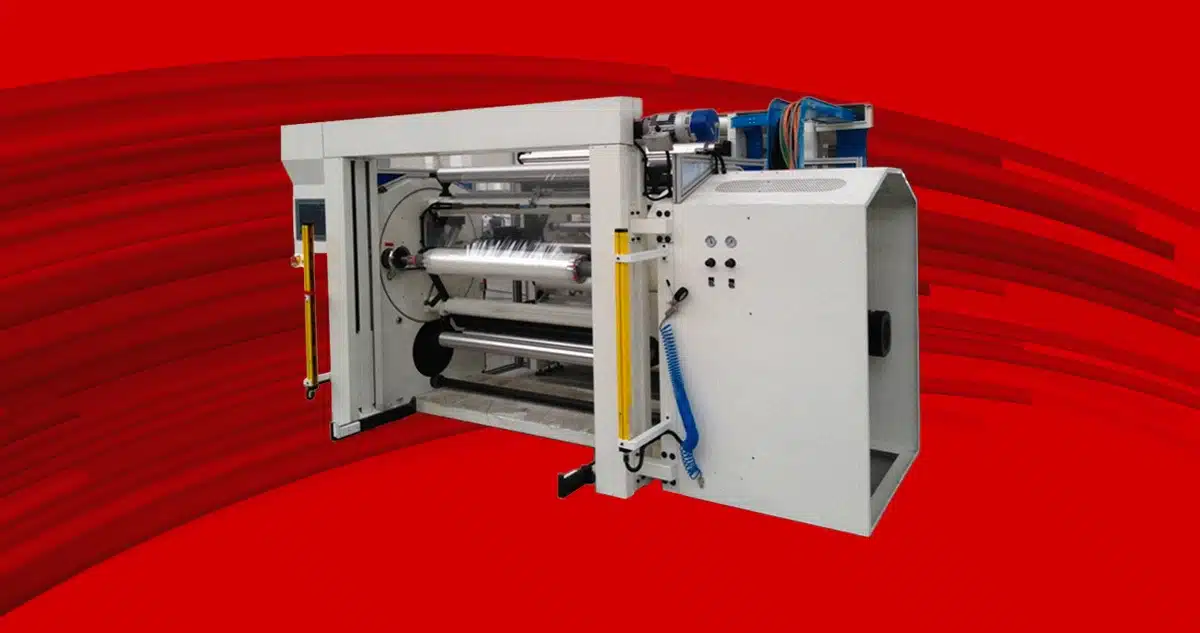
The introduction of new materials as well as new control techniques has resulted in the expansion of the flexographic printing technique, broadening the areas of use and application. The top of the range category has flexographic central drum gear-less printers that prints at speeds above 600 m/min while maintaining register accuracies within tens of microns.

The flexographic printer with a central drum can be equipped with up to ten printing units, each fitted with up to a max. seven servo motors. Axis positioner motion (cylinder pressure and cross register) can be achieved through mechanical transmission (typically bolt / nut) and coupled to a servomotor. In dynamic and high precision applications, linear motors are also used for the pressure axes.
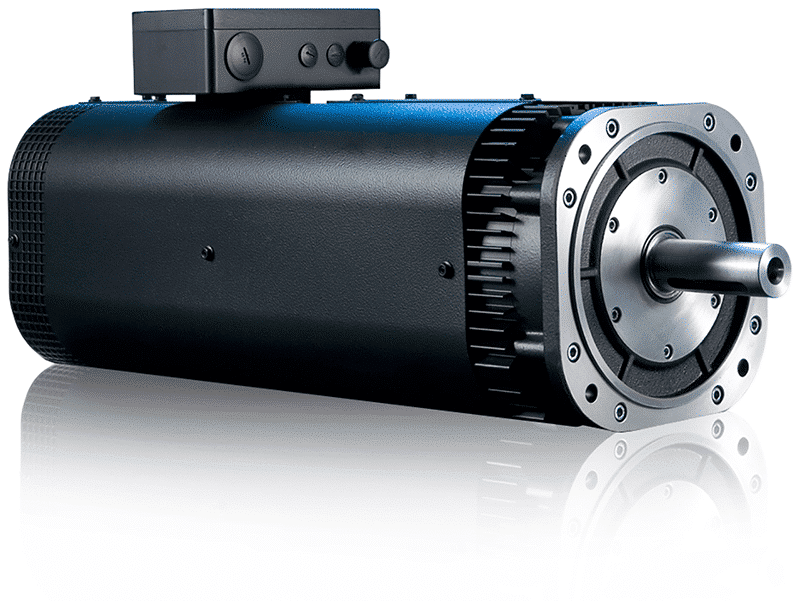
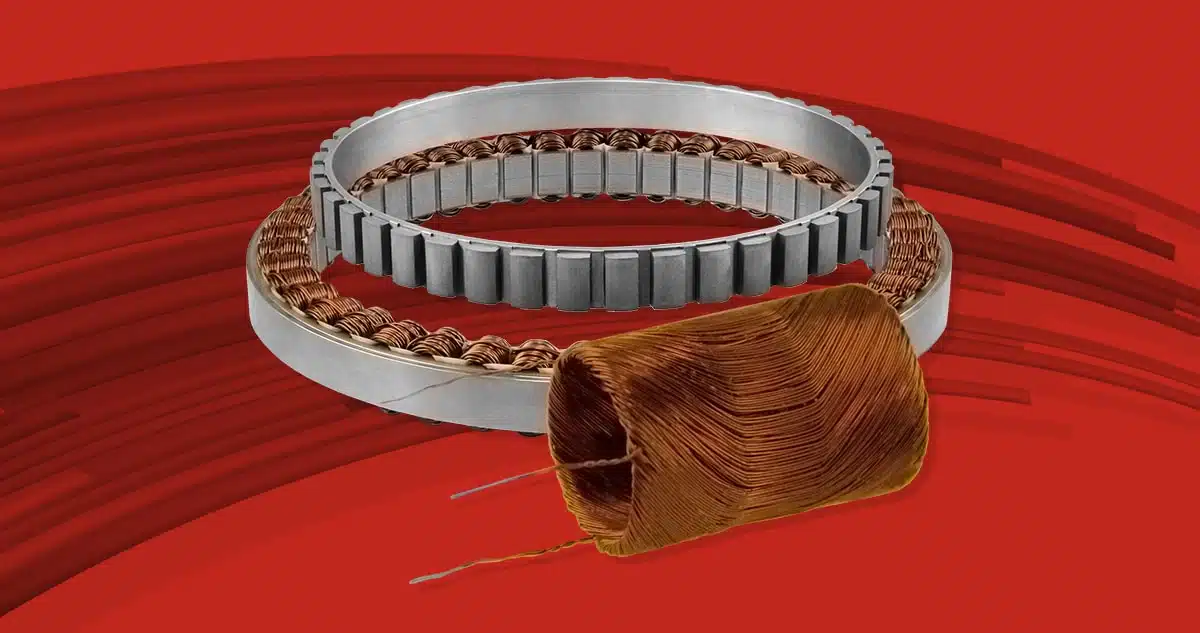
The servo motors that move the cliché and the anilox servo motors are rigidly coupled to the spindle with variable torque from 40 to 100 Nm and the position feedback is obtained from a high resolution optical encoder in order to ensure high accuracy even with larger formats.
The central drum is the only offset roller for all colours. It is typically powered by a directly coupled torque motor; the feedback consists of a high resolution encoder which closes the control loop of the position.
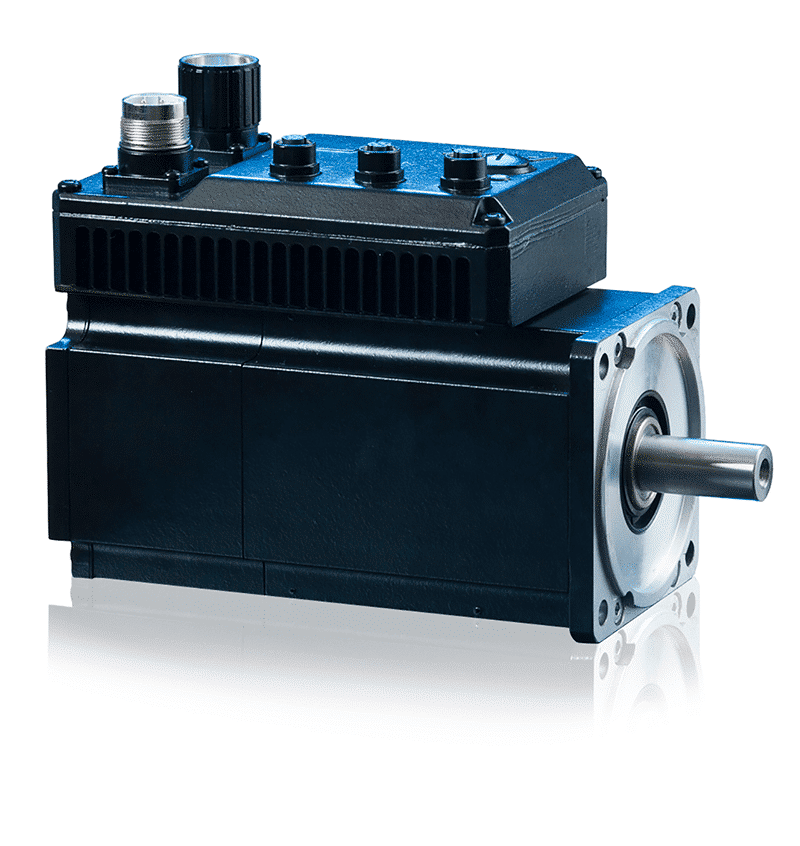
The machine is completed by the axes set up to manage the drawing of the material to be printed (winding, unwinding and calendars) normally speed driven with variable or load cell correction.For driving all servomotors on this type of machine, AMK offers solutions with centralised architecture (drives from the electrical panel) or mixed (centralised and distributed) relocating IP65 drives on the machine and in the vicinity of the servo motor.
Synchronised movement is ensured by the AMKASYN control systems, A4 / 5 series, via virtual axes, electric trees and electronic cam profile functions using the high performance of the EtherCAT real time bus.